
دانلود مقاله مد لغزشی خودروهای هیبریدی
28 صفحه Word – قابل ویرایش + دارای منابع
بخشی از متن
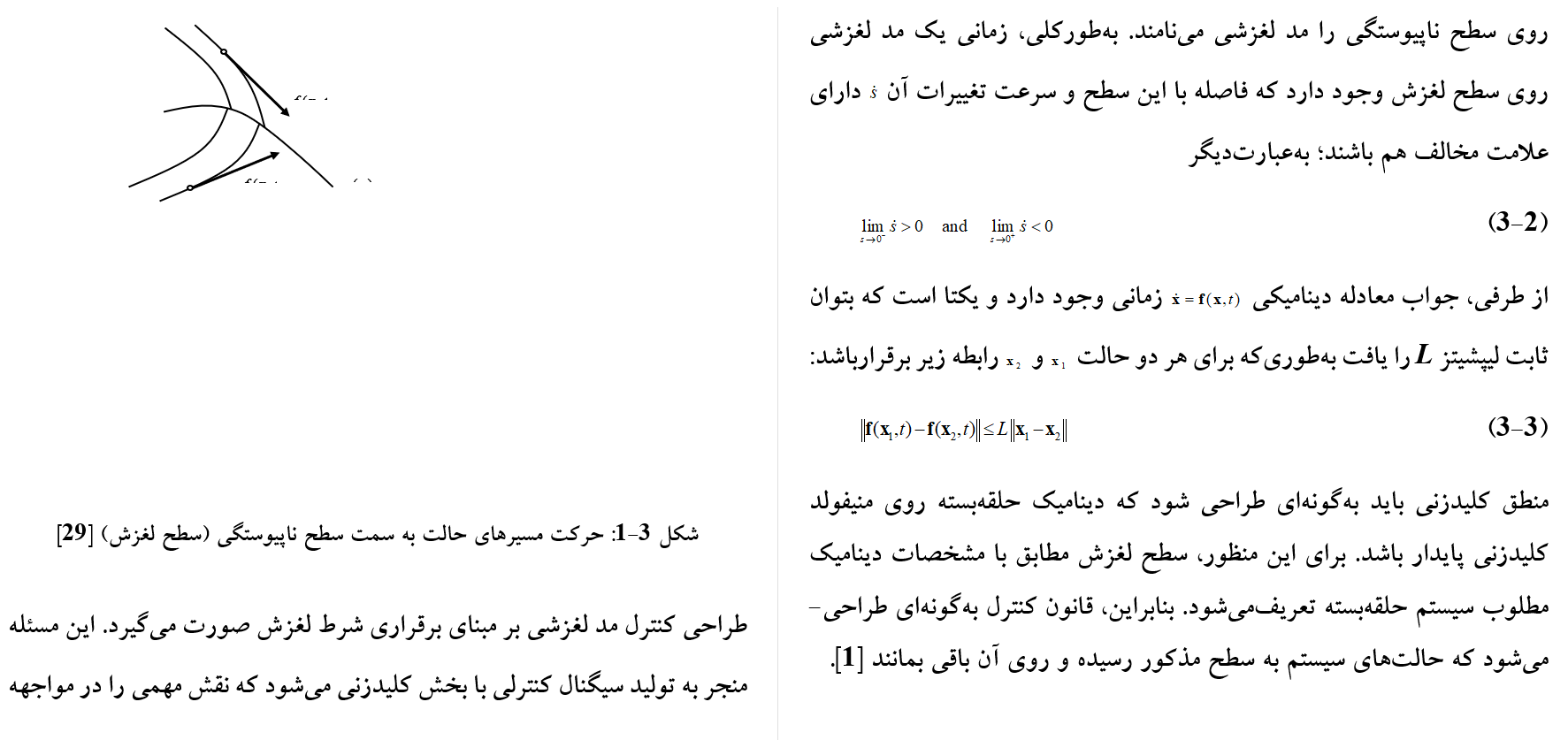
در برخی فرآیندها در مکانیک، مهندسی برق و سایر حوزهها، سمت راست معادلات دیفرانسیل توصیفکننده دینامیک آنها، نسبت به حالت فعلی فرآیند ناپیوستگی دارد. یک مثال بارز از چنین سیستمی، سیستم مکانیکی با اصطکاک خشک است که در آن نیروی مقاومت بسته به جهت حرکت، میتواند مثبت یا منفی باشد. این ویژگی در سیستمهای کنترل خودکار که هدفشان بهبود عملکرد، کاهش توان مصرفی، محدود کردن تغییرات پارامترهای کنترلی و دیگر اهداف است، منجر به شکلگیری قوانین کنترلی به صورت توابع ناپیوسته از بردار حالت و ورودیهای سیستم میشود.

به طور کلی، کنترل مد لغزشی دو مزیت اصلی دارد: اول اینکه رفتار دینامیکی سیستم را میتوان با انتخاب مناسب تابع کلیدزنی، به شکل دلخواه تنظیم کرد. دوم اینکه پاسخ سیستم حلقه بسته به طور کلی نسبت به کلاس خاصی از نامعینیها، غیر حساس شده یا حساسیت آن کاهش مییابد. کنترل مد لغزشی شما دو مولفه است که مولفه اول شامل طراحی یک تابع کلید زنی است که حرکت لغزشی مشخصات طراحی را برآورده نماید. مولفه دوم در ارتباط با انتخاب قانون کنترل نه لزوما ناپیوسته میباشد. به شکلی که تابع کلیدزنی برای حالت سیستم مناسب باشد.
تصویری از بخشی متن و منابع
مقاله مرتبط: مقاله استانداردهای جاذب های انرژی روی سپر خودرو ایرانی و خارجی ، برنامه راهبردی استراتژیک شرکتBMW
درخواست مشاوره
برای کسب اطلاعات بیشتر درباره این دوره درخواست مشاوره خود را ارسال کنید و یا با ما در تماس باشید.
درخواست مشاورهدوره های مرتبط

تحقیق در مورد خطبه فدکیه | 31 صفحه word
تحقیق درباره خطبه فدکیه – مقاله در مورد فدک – خطبه فدکیه حضرت زهرا 31 صفحه فایل word توضیحی در…
پایان نامه نقش تبلیغات بر گروه های موسیقی در فضای مجازی
مقاله نقش تبلیغات بر گروههای موسیقی در فضای مجازی 56 صفحه فایل word که قابل ویرایش می باشد چکیده…
گزارش کاربینی شغل طراحی و چاپ (چاپخانه)
گزارش کاربینی چاپخانه عنوان شغل: چاپ-(چاپخانه) تعداد صفحات : 9 موصوعات : مقدمه شناخت شغل معرفی شرح کلی فعالیتهای سازمان…



قوانین ثبت دیدگاه